



ラバーバンドイリュージョンとは?
ラバーバンドイリュージョンというのは、聞き慣れない言葉ですが、これは視覚と触覚の乖離を示す現象になります。
言葉で説明すると長いので、図を示すと以下のような実験で引き起こされる錯覚現象になります。
出典;Body in Mind Research into the role of the brain and mind in chronic pain
https://bodyinmind.org/rubber-hand-indicates-intact-multisensory-integration-in-crps/rubber-hand-illusion/
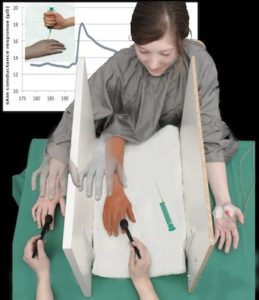
このような設定でゴムの手と実際の手を同じタイミングで刺激していくと、ゴムの手を触られただけでも、あたかも本当に触られたように錯覚するようになります。
この現象は、自分が自分であるという感覚とはどのようなものかということを考える上で非常に興味深いのですが、はたしてこれはどのような仕組みで引き起こされているのでしょうか。
今回取り上げる論文は、ラバーバンドイリュージョンが起こっているときの脳活動について、予測的符号化理論の観点から考察したものです。
Dynamic causal modeling of touch-evoked potentials in the rubber hand illusion.
予測的符号化とは?
予測的符号化というのは、端的に言えばあらかじめ神経細胞の反応の仕方を仕込んでおくことになります。
従来の考え方では、
刺激入力→低次情報処理(一次視覚野など)→高次情報処理(V5など)・・・主観的認知
と考えられていたのですが、
これだけで情報を処理しようとすると、あまりに情報が多すぎて何がなんだかわからなくなる可能性があります。
そのため、経験則に基づいてあらかじめ情報処理の仕方にバイアスを掛けておくモデルを考えると
刺激入力→低次情報処理(一次視覚野など)←高次情報処理(V5など)・・・予測的認知
のような形で、刺激を適切に拾えるように、低次情報処理を担う領域の反応の仕方をあらかじめ仕込んでおき、
もし実際の刺激が予測していたものと違う場合には、低次情報処理を担う領域からフィードバックがかけられ、さらに新しい予測が立てられる
刺激入力→低次情報処理(一次視覚野など)⇄高次情報処理(V5など)・・・予測的認知
というモデルになります。
このモデルで考えると低次情報処理領域の主な仕事は予測と現実の誤差検出と高次情報処理領域へのフィードバックということになります。

ラバーバンドイリュージョンが起こっているときの神経活動とは?
この研究では
・実際の手を刷毛で触る(リアル条件)
・ラバーバンドと実際の手を同じ肢位でおいて刷毛で触る(一致条件)
・ラバーバンドは前腕を回外肢位で(手のひらを上に向けて)、実際の手は回内肢位で(手のひらを下に向けて)おいて刷毛で触る(非一致条件)
の3条件で刺激を与え、その時の神経活動について脳波測定から得られたデータをもとに調べています。
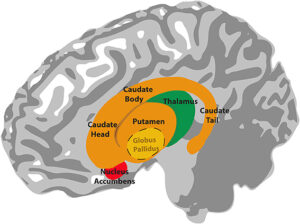
調べ方としては
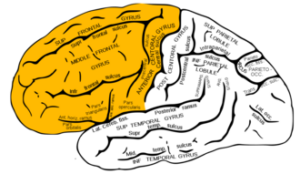
腹側運動前野(高次情報処理領域)
一次体性感覚野(低次情報処理領域)
後頭葉(低次情報処理領域)
の関係性について、どの領域がどの領域の活動を調整しているのかという情報伝達の流れも含めて検討しています。
結果を述べると
・ラバーバンドイリュージョンは一致条件で起こりやすかった
・ラバーバンドをおいた設定(一致条件と非一致条件)では、リアル条件と比べて後頭葉から腹側運動前野の情報の流れが強くなっていた
・ラバーバンドイリュージョンが起こっているときは一次体性感覚野内部での情報処理の流れが弱くなっていた
ということが示されています。
前者については、ラバーバンドをおいた設定では触覚刺激からの不確かさを補うために視覚から高次情報処理領域へのフィードバックが強くなったのではないか、
また後者については、体性感覚をあらかじめ重み付けせずに活動させるという予期的符号化に係る活動を示すものではないかということが述べられています。
頭でわかっていても脳が間違えるということがあるのだなと思ったり、
脳というのは経験則に基づいて、もっとも起こりそうなことを予測するマシンなのかなと思いました。
ロボットは錯覚することが出来きるのか?ラバーバンドイリュージョンと予測的符号化
人間というのは理性と直感に基づいて愚かなことをする能力がある生き物ですが、果たしてロボットも間違いを犯すことがあるのでしょうか。
今回取り上げるのは、ラバーバンドイリュージョンと同じ設定で刺激を与えたときにロボットが錯覚を起こすかどうかについて調べたものです。
ではロボットの錯覚というのはどのように測定したのでしょうか?
自己受容感覚ドリフトとは?
普段私達は自分の手足がどこにあるか無意識のうちにわかっているような気がしますが、それでも長時間正座して足がしびれたりすると
足首の曲がり具合がわからなかったりして簡単にバランスを崩してしまいます。
自分の体がどのような状態になっているかというのは自己受容感覚と呼ばれるのですが、ラバーバンドイリュージョンではこの自己受容感覚がずれてしまうことが知られています。
具体的には机の上においた自分の前腕がどこにあるかと尋ねられると、
ラバーバンドイリュージョンを行った後では、よりラバーバンド寄りの位置にあるように感じられてしまう減少があり、
これはラバーバンドイリュージョンによる自己受容感覚ドリフトと呼ばれています。

この研究ではロボットにヒトと同じような自己受容感覚感覚システムをプログラムしておき、果たしてヒトと同じように錯覚するかどうかについて調べています。
この自己受容感覚システムというのは、目(視覚センサ)で見た視覚情報と肌(触覚センサ)で感じた触覚情報、固有感覚情報(関節角度)を統合して、自分の肩や肘がどれくらい曲がっているのかを推定するようなシステムになっています。
具体的には以下の図のような設定で、視覚センサと触覚センサを備えたロボットに対して、ロボットの偽物の腕を刷毛でなでてヒトと同じ刺激を与えて比べているのですが、

この条件では、触覚情報と視覚情報が固有受容覚情報と齟齬を起こしてしまうことになります(肩はこれくらい開いているはずなのに、実際目に見える腕の位置は違う、でも確かに目に見える位置で触覚刺激が与えられている)。
ロボットの自己受容感覚システムはこの齟齬を解消するようにプログラムされているのですが、果たしてロボットはどのような錯覚を起こすのでしょうか。
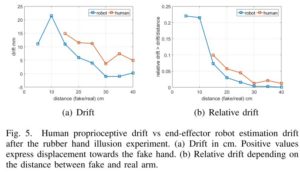
ロボットの自己受容感覚ドリフト
このような錯覚はヒトであれば、ラバーバンドが置かれた場所が本当の腕から遠くなればなるほど大きくなる、つまり実際に感じる腕の位置がより内側に感じられるようになることが知られているのですが、
この実験ではロボットもヒトと同じように偽物の腕の位置が遠くなるほど錯覚も大きくなること、
またこの錯覚は、予測と実際の誤差を解消するような仕方でなされることが示されています。
普段私達は自分の体がどのようになっているのかを知っているのは、当たり前過ぎて気づきもしませんが、案外この感覚、自己受容感覚というのは随分と可変的なものだなと思ったり、
歩くことがおぼつかない幼児や脳損傷でうまく座ったり立ったりできない患者さんのことを考えると、適切な自己受容感覚というのは結構な量の学習に基づいているのかなと思いました。
もう一つ突っ込んで考えると、ヒトの脳の機能というのは、本質的に辻褄を合わせることなのかなと思いました(私達がファクトだと思っていることはもっともマシな辻褄なのかなと)。
難しいです。。
脳科学に関するリサーチ・コンサルティングを承っております。
子育てや家事、臨床業務で時間のない研究者の方、
マーケティングや製品開発に必要な脳科学に関する論文を探している方、
数万円からの価格で資料収集・レポート作成をいたします!
ご興味のある方は以下よりどうぞ!
エラー: コンタクトフォームが見つかりません。