


目次
「ヒトの運動学習におけるモデル―ベースメカニズムとモデルなしメカニズム」①
運動制御に関わる神経機構についての新しい知見についていくつか取り上げてきました。
その中心になるのが最適フィードバック制御理論に基づく運動制御システムでこれは以下の概念図で示されるものになります。
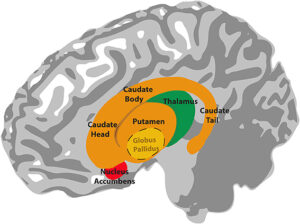
→→→基底核←←←←←
↑ ↓ ↑
↑ 運動野:指令→・→身体状態変化・外部環境変化
↑ ↑ ↑ ↓
↑ ↑→→→ ↑ ↓
↑ ↑ ↓ ↑ ↓
頭頂葉:状態評価←←小脳:内部モデル ↓
(こうなった+こうだろう) (これするぞ!モデル) ↓
↑ ↓
←(こうなった情報)←感覚系←←←←
他の記事を見ていただければ分かるように、この運動制御の肝になるのは小脳の内部モデルになるのではないかと思います。
しかしながら運動学習というものを考えた時にこの小脳の内部モデルはどのように大事なのでしょうか。
いろいろ調べる中で近年の新しい枠組みであるモデルベース学習とモデルなし学習というものに突き当たったので、これについてこの論文をベースにして数回にわけて書き記していきたいと思います。
Model-Based and Model-Free Mechanisms of Human Motor Learning
まず学習うんぬんについて述べる前に小脳内部モデルについてもう少し詳しく書く必要がありそうです。
上の図を見てみればわかると思うのですが小脳内部モデルは二つの矢印を出しています。
運動野:指令→・→身体状態変化・外部環境変化
↑ ↑ ↑
↑ ↑→→→ ↑
↑ ↑ ↓ ↑
頭頂葉:状態評価←←小脳:内部モデル
つまり左を見れば頭頂葉に内部モデルの情報を送っているし、上を見れば運動野の出力調整に内部モデルの情報を送っている。
内部モデルはこのように二つの矢印を持っているのですが、この二つは同じ内部モデルであっても違う情報のようです。
運動野の方に流れているのは運動モデルになるようです。投げるのであれば投げる、跳ねるのであれば跳ねるという運動プログラムが小脳から運動野に実際の運動に先駆けてフィードフォワード的に送られる。
こういったモデルを逆-内部モデル(以下逆モデル)というようです。
それでは小脳から頭頂葉に送られる情報というのはどういったものでしょうか。
これは内部モデルの中でも感覚モデルになるそうです。
この感覚も出るというのは、はこの運動をしたらこの筋はこれくらい伸びた感じがして、衝撃はこんな感じで、視界に写る景色はこうなるはずだという予想的な感覚情報です。
つまりこの運動をしたらこんなふうに感じるだろうというバーチャルな感覚情報が小脳から頭頂葉に送られる。
こういった感覚情報(感覚モデル)を順-内部モデル(以下順モデル)というようです。
小脳には内部モデルという運動情報のコピーがある。
このコピー(内部モデル)のうち、運動そのものに関する情報が逆モデル、運動によって引き起こされる感覚についての情報が順モデル、
そのおのおのが運動野の方に流れたり、頭頂葉の方に流れたりという図式があるようです。
くどいようですがもう一度図式をのせておきます。
→→→基底核←←←←←
↑ ↓ ↑
↑ 運動野:指令→・→身体状態変化・外部環境変化
↑ ↑ ↑ ↓
↑ ↑→→→ ↑ ↓
↑ ↑ ↓ ↑ ↓
頭頂葉:状態評価←←小脳:内部モデル ↓
(こうなった+こうだろう) (これするぞ!モデル) ↓
↑ ↓
←(こうなった情報)←感覚系←←←←
次はこの説明をベースにしてモデルベース学習について説明をしたいと思います。
「ヒトの運動学習におけるモデル―ベースメカニズムとモデルなしメカニズム」②
①運動制御の肝は内部モデルだ
②内部モデルは小脳にある
③小脳の内部モデルは二つの側面がある。
④一つは逆モデル、これは運動を示すモデルで運動野に送られ先行的に運動を制御する
⑤一つは順モデル、これは運動の結果得られる感覚を示すモデルで頭頂葉に送られて間接的に運動を制御する。
文字で書くとややこしいのでいつもの図を引っ張ってくると
→→→基底核←←←←←
↑ ↓ ↑
↑ 運動野:指令→・→身体状態変化・外部環境変化
↑ ↑ ↑ ↓
↑ ↑→→→ ↑ ↓
↑ ↑ ↓ ↑ ↓
頭頂葉:状態評価←←小脳:内部モデル ↓
(こうなった+こうだろう) (これするぞ!モデル) ↓
↑ ↓
←(こうなった情報)←感覚系←←←←
というふうになっているのですが、これをベースにして考えるとモデルベース学習とモデルなし学習というものが考えられるそうです。
ではこのモデルベース学習とモデルなし学習というのはどういったものなのでしょうか。
モデルベース学習について説明すると、これはすなわち順モデル(頭頂葉←小脳)があっているかどうかで学習がされるような方法らしいです。
赤ちゃんの歩き始めにかかわらず、なにか運動を行うときというのはおっかなびっくり探りながらになるではないかと思います。
こうすればこうなるはずだという予測を立てながら、おっかなびっくり運動を行っていく。
例えばスケートの滑り始めを考えてみましょう。
滑り始めのころはおっかないので、無鉄砲にスイスイ滑るなどということはできない。
こう滑ればこうなるのかなという予測を立てながら慎重に滑っていく。
予測と違って思いの外加速がついてしまうかもしれないし、あるいは思いの外カーブが切れないかもしれない。
予想通りの感覚が得られるかもしれないし、予想とは違う感覚が返ってくるかもしれない。
つまり予想(感覚)モデルと実際の感覚の差異によって運動モデルが構築されていく、そういった学習をモデルベース学習というようです。
ではモデルなし学習というものはどういうものでしょうか。
これはモデルを介さない学習のことではないかと思います。
たとえば片麻痺の患者さんの歩行を考えてみましょう。
最初は歩くのもおぼつかなくて外界の状況と内部状況を探りながら慎重に歩行する、それが何回か繰り返される中で、それなりの歩行モデルができてきて割に安定して歩けるようになる。
こういった学習の仕方は先に述べたモデルベース学習でしょう。すなわち順モデルがあっているかどうかで学習がすすんでいく。
ところが安定して歩けるようになる前後くらいからセラピストの口がやかましくなってくる。
「あ、今のステップいいですね」
とか
「いまのはだめです」
とか
何らかの形でうまくいったかいかないかのフィードバックがかかってくる。
歩く時というのはいわずもがな運動野が活動しているのだけれども、いいとか悪いとかいわれているうちに、いいパターンの運動野の活動だけが強化されてくる。
こういった運動学習は別に内部モデルから得られる感覚がうんぬんというのは関係なく、その運動野の活動が良かったか悪かったかだけで形成されていく。
それゆえモデルを必要としない学習、モデルフリー学習といわれるそうです。
つまりまとめると
小脳の内部モデルを変えて間接的に運動野の活動パターンを変える→モデルベース学習
運動野の活動パターンを直接変える→モデルなし学習
になるのではないかと思います。
野球だと実際にバットを振ってボールに当てたり空振りしたりを繰り返す中でバッティングを覚えるような方法がモデルベース学習で
ひたすら正しいフォームで素振りするようなのがモデルなし学習だと思っていただければと思います。
次は少脳疾患におけるこのモデルベース学習とモデルなし学習の際について説明したいと思います。
「ヒトの運動学習におけるモデル―ベースメカニズムとモデルなしメカニズム」③
その昔、この仕事について間もない頃、頭部外傷で失調症状を示したある女性のリハビリに当たることがありました。
初めて見る失調症状でとても大変だった覚えがあるのですが、とても印象的な光景があります。
移乗動作にしても上肢でのリーチ課題にしても失調で動作がガタガタした不器用なものだったのですが、乾燥機から出したばっかりの、まだたたんでいないタオルをみると、いつものボヤーッとした表情で、でもてきぱきと手際よくタオルを空中でヒョイッ、ヒョイッと四つ折りに器用にたたんでいくのです。
ついさっきの練習では何をさせても失調症状でガタガタだったのに、タオルを目の前にすると熟練の主婦の手さばきでひょいひょいと器用にたたんでいく。
小脳疾患では一般に運動は不器用になるともいいます。実際にリハビリ室でリハビリをさせても失調症状が強く新規の学習もままなりません。それにも関わらずタオルをたたむのは全く問題がない。これはいったい神経学的にどう説明ができるのでしょうか。
例によって運動制御の概念図を広げてみましょう。
→→→基底核←←←←←
↑ ↓ ↑
↑ 運動野:指令→・→身体状態変化・外部環境変化
↑ ↑ ↑ ↓
↑ ↑→→→ ↑ ↓
↑ ↑ ↓ ↑ ↓
頭頂葉:状態評価←←小脳:内部モデル ↓
(こうなった+こうだろう) (これするぞ!モデル) ↓
↑ ↓
←(こうなった情報)←感覚系←←←←
昨日説明したように運動の種ともいえる小脳内部モデルには二つの側面があると言われています。
一つは逆モデルで、これは運動を示すモデルで運動野に送られて先行的に運動を制御するそうです。
もう一つは順モデル、これは運動の結果得られる感覚を示すモデルで頭頂葉に送られて間接的に運動を制御するそうです。
なにか運動を行う時は逆モデルを運動野に送って、直接それいけ!とフィードフォワード的に駆動することもあるかもしれないし(この辺の機序についてはまだ議論はあるようですが)
あるいは順モデルを頭頂葉に送って「こうしたらこうなるかもしれない・・・」と慎重に予測を立てながら運動を行うということもあるかもしれない。
例えばリハビリ室の中を歩くという課題はまったく慣れていない課題です。「こうなったらこうなるかもしれない」と予測しながらやるような順モデルが大事になってきそうな課題です。
小脳疾患の患者さんはこういう新規の課題はやらせても下手だし、なかなか定着しない。
これは運動制御の順モデルのほうがうまく回っていないためかもしれません。
でも手慣れたタオルたたみはスムーズにできる。これは運動予測なしに逆モデルだけでできる既に習得済みの動作であるためかもしれません。
話が長くなりましたが、小脳疾患による運動の不器用さというのは小脳内部モデルの中でも順モデル(運動結果の予測モデル)の方の問題であって、逆モデル(運動指示そのもののモデル)の問題ではないかということです。
小脳疾患で不器用なのは順モデルが大事な新規の動作、新規の学習であって、逆モデル一本で行けるような熟練動作はそれほど不器用ではない。
そういったことが考えられるのではないかと思います。
では小脳疾患患者に対しての運動学習方略としてはどういったことが考えられるのでしょうか。
次はモデルベース学習(実戦でバットを振って覚える学習)とモデルフリー学習(ひたすら正確な素振りをしてバッティングを覚えるような学習)の二種類を順モデル、逆モデルにからめて考えてみたいと思います。
「ヒトの運動学習におけるモデルベースメカニズムとモデルなしメカニズム」④
今回の記事は長いです。しかもややこしいです。
時間のない方は暇な時にでも、また興味のない方は読み飛ばしたほうがいいかもしれません。
さて今日のテーマは小脳疾患に対する運動学習方略についてですが、本題に入る前に今まで書き記したことを一度簡潔にまとめてみたいと思います(⑦に関しては新規紹介事項)。
①運動制御の肝は内部モデルだ
②内部モデルには逆モデル(運動モデル:小脳→運動野に連絡)と順モデル(予想的感覚モデル:小脳→頭頂葉→運動野に連絡)の二つの側面がある。
※下図参照
→→→基底核←←←←←
↑ ↓ ↑
↑ 運動野:指令→・→身体状態変化・外部環境変化
↑ ↑ ↑ ↓
↑ ↑→→→→→↓ ↑ (逆) ↓
↑ ↑ ↓ ↑ ↓
頭頂葉:状態評価←(順)←小脳:内部モデル ↓
(こうなった+こうだろう) (これするぞ!モデル) ↓
↑ ↓
←(こうなった情報)←感覚系←←←←
③内部モデルは順モデルがあっているかどうかで形成されていく。つまり予想した通りの感覚が得られるか得られないかで順モデルが徐々に出来上がっていく。
④③の過程をモデルベース学習と呼ぶ。
⑤モデルベース学習とは別にモデルなし学習というものもある。これは行った運動が正しかったか正しくなかったかで学習されれるもので、内部モデルとの比較照合は関係しない。
⑥モデルなし学習は小脳⇆頭頂葉ループの順モデルを介さず、運動野の特定の活動だけが強化される。
⑦モデルなし学習においては報酬刺激によって強化される。基底核を損傷したラット、あるいはパーキンソン病患者においては報酬系が充分でないため、モデルなし学習は成立しづらくなる。
⑧小脳疾患患者は運動の不器用さが見られ、新規運動パターンの学習も不得手である。
⑨小脳疾患患者は発症以前に学習した運動については必ずしも不器用ではない。
⑩ ⑧と⑨の矛盾する現象は小脳疾患患者の不器用さ、運動学習能力の低下は順モデルが回らないことによって説明しうる。つまり感覚予測が立てられないから運動が不器用になり、また感覚予測が立てられないからモデルベース学習が成立せず、新規の運動学習が困難になる。熟練した動作については必ずしも順モデルを必要としないのでスムーズに遂行しうる。
⑪以上から小脳疾患の運動障害は内部モデルの中でも順モデル(感覚予想モデル)の問題に起因するものと考えることが出来る。
長くなりましたが、今日はこれらの知見に別の知見を重ねて、小脳疾患における運動学習方略はどのようなものが妥当か考えてみたいと思います。
運動学習というのはいろんな捉え方が出来ると思うのですが、その一つに運動適応(motor adaptation)という現象があります。
これは例えば平地を歩いていて急にジャリジャリの道に入り込むと一時的にはうまく歩けなくなるけど、すぐに適応してスムーズに歩けるようになる、あるいはいつもとは違う自動車を運転するときには最初はぎこちないけど、少し運転していれば適応してスムーズに運転することが出来る、そういった現象のようです。
小脳疾患患者は一般にこの運動適応が苦手なのですが、これは順モデルがうまく回らず結果小脳の内部モデルが更新できないためではないかということが言われてきたそうです。
しかしある研究によって、段階的に設定を徐々に徐々に変えていけば小脳患者でも運動適応が十分に可能であることが示されているそうです(Rost et al.2005)
これは小脳-頭頂葉の順モデルループをモデルなし学習(適切な運動野の活動だけを強化していくような学習)によるものではないかということが考えられると思います。
また別の研究では明示的な指示(例として、今持っているバケツは10秒後に半分の重さに変化します、とか、あるいは次にもってもらうボールは今持っているボールの二倍すべすべしたものになりますとか)を予め出しておけば、小脳疾患患者でも十分な運動適応が可能であることが報告されています(Taylor et al 2010)。
このころからは小脳順モデルによる自動的で暗黙的な感覚予測はできないけれども、他の認知関連領域(前頭前野?)を介した意識的で明示的な感覚予測は可能で、それを介した適切な運動制御も可能であることが考えられます。
こういったことから考えられる小脳疾患患者に対する運動学習法略はどういったことが考えられるでしょうか。ここから先は私自身の考えになるので参考程度にとどめてもらえればと思います。
一つはモデルベース学習よりもモデルフリー学習に重点を置いた学習のほうがいいのではないかということです。
小脳がきちんと働いていれば試行錯誤の中から適切な内部モデルをつくって柔軟に環境の変化に対応するということも可能でしょうが、小脳疾患によって試行錯誤学習が成立しづらいのであればひたすら適切な運動パターンを運動野に叩きこむようなモデルフリー学習の方が妥当ではないかと考えます。
もう一つは暗黙知よりも形式知のほうが良いのではないかということです。
暗黙知というのは試行錯誤の中から出てくる内部モデルのようなものです。つまりコツとか勘といわれるものです。小脳疾患患者に試行錯誤でコツや勘を学習させるのは難しいような気がします。ならば言葉に落とせるような明示的な指示で学習させたほうが良いのではないかと思います。
もう一つは、柔軟で適応性の高い内部モデルを学習しようとするよりも、状況依存的で定型的な運動パターンを数多く身につける方略の方が良いのではないかということです。
さらにもう一つは小脳疾患に限ったことではないのですが、報酬をしっかり出すことではないかと思います。報酬回路によってモデルなし学習が改善することが報告されています。
以上をまとめると小脳疾患患者に対する運動方略としては
①定形動作の反復学習(モデルなし学習)
②指示は明示的に
③暗黙的な知識、つまり勘やコツといったものを患者に求めない
④汎用性の高い運動を学習するよりも、汎用性は低いが状況特化的な運動パターンを多数学習させる
⑤報酬を意識して
⑥明示的な指示が入りやすいようにベッド周りや洗面所などの生活動線上に目印・メッセージ的なものを提示する
ということが考えられるのではないかと思います。
脳科学に関するリサーチ・コンサルティングを承っております。
子育てや家事、臨床業務で時間のない研究者の方、
マーケティングや製品開発に必要な脳科学に関する論文を探している方、
数万円からの価格で資料収集・レポート作成をいたします!
ご興味のある方は以下よりどうぞ!
エラー: コンタクトフォームが見つかりません。